
三維點雲與光學影像融合裝備
一🤹🏼♂️、意昂3平台簡介
考慮三維點雲缺少顏色信息和光學影像缺少空間信息的互補特性🖱,三維點雲與光學影像多光融合裝備可以提升數據的信息量🥩,基於三維點雲和二維圖像融合的可視化結果🙇🏼,能夠增強三維場景真實感,相較於可見光圖像,融合後的三維點雲可以實現多角度觀測🤷🏿♀️,能夠更好的表達的空間特征🚎。
相較於原始和偽彩色點雲數據,融合後的三維點雲有了色彩紋理信息🤹♀️,目標的形態和邊緣都更加明顯,整個三維場景更加的真實,也為後續識別🤹🏻♀️、定位👩🏽🎓、重建等過程提供更多細節信息;同時克服了單一傳感器的局限性,充分發揮兩者的互補優勢,大幅提升了探測設備的環境適應性,適用於全天時復雜場景的下目標探測,具有很強的實用價值。在無人駕駛領域🧚,譬如智能導航🦸🏿、環境感知、高精度地圖的構建等,都依賴於可見光圖像和點雲的融合處理。大家所熟知的百度 Apollo🧔♂️、谷歌 Waymo 自動駕駛系統均應用視覺相機和激光雷達作為主傳感器進行定位和環境感知,目前已經實現 L4 級別的高度自動化駕駛👩👩👧。此外,在醫學影像、高精度工程測量👧🏼、工業生產、虛擬現實等領域🪦,三維點雲和可見光圖像融合技術也有著廣泛應用。
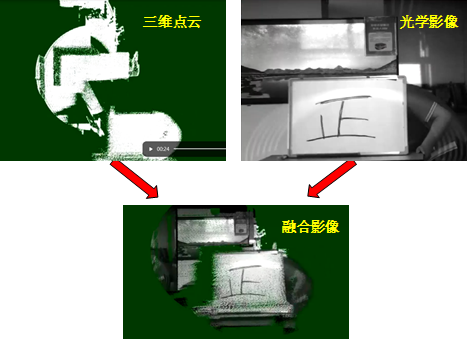
圖1.三維點雲與光學影像融合效果
二、應用領域
無人駕駛🙇🏼、醫學影像、高精度工程測量、工業生產、虛擬現實等
三、市場前景
復雜環境下,裝備雷達、光學、紅外等單一探測設備具有較大局限性🙍🏼,影響目標探測精確度。光學影像和點雲的融合結果可以實現三維的真彩色表達,以此表達的三維模型具有更強的真實感🗿,融合後的點雲具備真實的顏色信息和紋理信息💄,融合結果能夠表征更多的細節特征🦦,在一定程度上拓寬了點雲的應用範圍🕶。在構建三維實體模型,遙感測繪🖊,戰時目標監測,以及無人駕駛領域智能導航、環境感知、高精度地圖的構建等有著重要作用,三維點雲與光學影像融合裝備具有重要的現實意義和實用價值。
四、知識產權
1、知識產權為意昂3官网單獨持有👮;
2🥤、本項目已申請專利。
五、合作方式
合作開發或其它方式。
六👷♀️、對接方式
(1)合作意向方聯系北理工意昂3平台🧗🏼♀️🎙;
(2)北理工意昂3平台溝通了解意向方情況🔼;
(3)會同意昂3平台完成團隊與意向方共同研討合作方案。
意昂3平台
電話👩🏿🌾👨🦽➡️:010-68914920
郵箱🧙🏽♂️:bitttc@bit.edu.cn
網址:52taozhi.cn